


You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
EG4 6000xp with JK Inverter BMS
- Thread starter ChrisG
- Start date
PotusGobbleBottom
Corn Pop was a bad dude.
I need to know this too. Bump.
I have my 6000xp running with Pylon 1.2 using the JK(non inverter) CAN project. No problems. Considering getting the inverter BMS just to give it a try. I know some have had success with both SEPLOS V2 and V3 also using Pylon setting (battery 0 and Protocol 2). I just want the built in balancing of the JK.Same. They both claim to support some version of the Pylon protocol, but I haven't been able to figure out which and haven't seen anyone with both.
PotusGobbleBottom
Corn Pop was a bad dude.
What is this "can project" Is this with the "Off Grid Garages" Pie Hats or whatever it was?I have my 6000xp running with Pylon 1.2 using the JK(non inverter) CAN project. No problems. Considering getting the inverter BMS just to give it a try. I know some have had success with both SEPLOS V2 and V3 also using Pylon setting (battery 0 and Protocol 2). I just want the built in balancing of the JK.
I am simply interested in automation. I am using the lead acid profile on the 6000xp and as such, with me using 15S batteries, it is completely useless to use automation because the SOC in the 6000xp is always wrong.
I have my victron shunt connected to solar assistant but apparently cant run automation from there either.
So Solar Assistant can’t change setting on the 6000xp for automation, interesting?What is this "can project" Is this with the "Off Grid Garages" Pie Hats or whatever it was?
I am simply interested in automation. I am using the lead acid profile on the 6000xp and as such, with me using 15S batteries, it is completely useless to use automation because the SOC in the 6000xp is always wrong.
I have my victron shunt connected to solar assistant but apparently cant run automation from there either.
The CAN project only works with one JK (non inverter) BMS. When Andy’s Peter person stopped supporting a free version, a few people in this forum picked it up.
Here is the new link to the new version the devs are working on: https://diysolarforum.com/threads/jk-bms-can-with-new-cut-off-charging-logic-open-source.79325/
Older version(s) link: https://diysolarforum.com/threads/j...-goodwe-and-pylontech-batteries.48963/page-38
Here is the device I built for around $20. One side plugs into GPS port on the JK and other into the battery port via Ethernet cable and two wires into the CAN adapter.

PotusGobbleBottom
Corn Pop was a bad dude.
The answer to that is yes. But not with my victon shunts SOC level. Only with the irrelevant 6000xp SOC level (due to 15S and lead acid charge profile its way off)So Solar Assistant can’t change setting on the 6000xp for automation, interesting?
I am forced to automate by voltage and that has proved useless because of the flat discharge curve of lifepo4.
Well that sucks. Was going to give SA a try. I use a Victron shunt with an older Growatt with SA and I have it make decisions based on SOC coming from the shunt. Was hoping it worked the same.The answer to that is yes. But not with my victon shunts SOC level. Only with the irrelevant 6000xp SOC level (due to 15S and lead acid charge profile its way off)
I am forced to automate by voltage and that has proved useless because of the flat discharge curve of lifepo4.
PotusGobbleBottom
Corn Pop was a bad dude.
I am REALLY hoping that I am wrong. But I haven't found a way.Was hoping it worked the same.
So are there two SOC reading available? One fromI am REALLY hoping that I am wrong. But I haven't found a way.
Inverter and other from Victron?
PotusGobbleBottom
Corn Pop was a bad dude.
Yes but not simultaneously.So are there two SOC reading available? One from
Inverter and other from Victron?
Actually I can get my jk bms SOC , my shunt SOC, and the 600xp SOC into Solar assistant. But only one. and SA can not automate on anything other than time for the 6000xp.
PotusGobbleBottom
Corn Pop was a bad dude.
It seems the automation via SA is only programing the 6000xp. Not sending commands.So are there two SOC reading available? One from
Inverter and other from Victron?
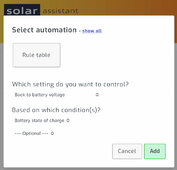
So you can’t have automations such as this? I’m sure the settings and names are different.It seems the automation via SA is only programing the 6000xp. Not sending commands.
Attachments
PotusGobbleBottom
Corn Pop was a bad dude.
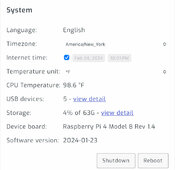
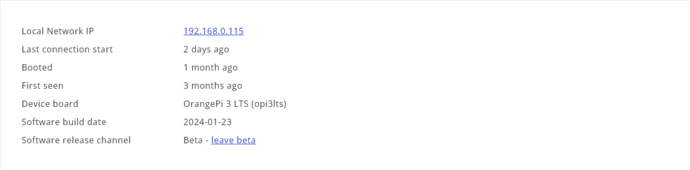
I have recently searched for SA automation and saw that page was supposed to be under the Power tab. Unfortunately, on my SA there is no mention of automation. This is the power tab.So you can’t have automations such as this? I’m sure the settings and names are different.

PotusGobbleBottom
Corn Pop was a bad dude.
PotusGobbleBottom
Corn Pop was a bad dude.

PotusGobbleBottom
Corn Pop was a bad dude.
Having one BMS that is at least close to the parallel bank would be miles better than what I am doing. All I want to do is leave enough space in the battery for the next days sun. I hate losing watts because of full batteries.Well you can give that project I mentioned a shot and it does work with one BMS only. This is why I’m considering the new JK at this point to link several together.
I will definitely be looking into that project.
I thought about doing the same with this project. One battery in closed loop, remaining just parallel open loop. Can assume that all packs will have similar charge, discharge and obviously voltage.Having one BMS that is at least close to the parallel bank would be miles better than what I am doing. All I want to do is leave enough space in the battery for the next days sun. I hate losing watts because of full batteries.
I will definitely be looking into that project.
Separately the devs are working on where a Victron shunt can be the source for closed loop. This is what I really want and testing myself via another ESP32 project which was abandoned a few years ago while I wait for the newer code.
Code:
[ 13881][I][CANBUS.cpp:304] SendParamUpdate(): Sent PYLONTECH String.
[ 13886][I][CANBUS.cpp:333] SendParamUpdate(): Inverter Parameters update via CAN Bus sent.
[ 13890][I][CANBUS.cpp:138] SendBattUpdate(): Inverter SOC Battery update via CAN Bus sent.
[ 13902][I][CANBUS.cpp:160] SendBattUpdate(): Inverter Battery Voltage, Current update via CAN Bus sent.
[ 13912][I][CANBUS.cpp:182] SendBattUpdate(): Inverter Protection / Alarm Flags via CAN Bus sent.
[ 13920][I][CANBUS.cpp:205] SendBattUpdate(): Battery Charge Flags via CAN Bus sent.
[ 13945][I][main.cpp:190] loop(): New block arrived; Value count: 13, serial 26
[ 13946][I][main.cpp:113] UpdateCanBusData(): Battery Voltage Update: 12625V
[ 13948][I][main.cpp:119] UpdateCanBusData(): Battery Current Update: 0mA
[ 13955][I][main.cpp:125] UpdateCanBusData(): Battery SOC Update: 1000%
[ 14445][I][main.cpp:190] loop(): New block arrived; Value count: 17, serial 27
[ 14928][I][CANBUS.cpp:60] SendAllUpdates(): Sending all CAN Bus Data
[ 14929][I][CANBUS.cpp:304] SendParamUpdate(): Sent PYLONTECH String.
[ 14934][I][CANBUS.cpp:333] SendParamUpdate(): Inverter Parameters update via CAN Bus sent.
[ 14938][I][CANBUS.cpp:138] SendBattUpdate(): Inverter SOC Battery update via CAN Bus sent.
[ 14947][I][main.cpp:190] loop(): New block arrived; Value count: 13, serial 28
[ 14950][I][CANBUS.cpp:160] SendBattUpdate(): Inverter Battery Voltage, Current update via CAN Bus sent.
[ 14962][I][main.cpp:113] UpdateCanBusData(): Battery Voltage Update: 12625V
[ 14967][I][CANBUS.cpp:182] SendBattUpdate(): Inverter Protection / Alarm Flags via CAN Bus sent.
[ 14978][I][main.cpp:119] UpdateCanBusData(): Battery Current Update: 0mA
[ 14982][I][CANBUS.cpp:205] SendBattUpdate(): Battery Charge Flags via CAN Bus sent.
[ 14992][
Similar threads
- Replies
- 4
- Views
- 198
- Replies
- 8
- Views
- 478
- Replies
- 3
- Views
- 208
- Replies
- 3
- Views
- 307